Publications
A list of my publications and preprints. You can also find my publications on Google Scholar and ResearchGate.
2024
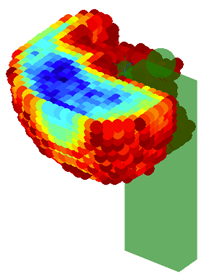
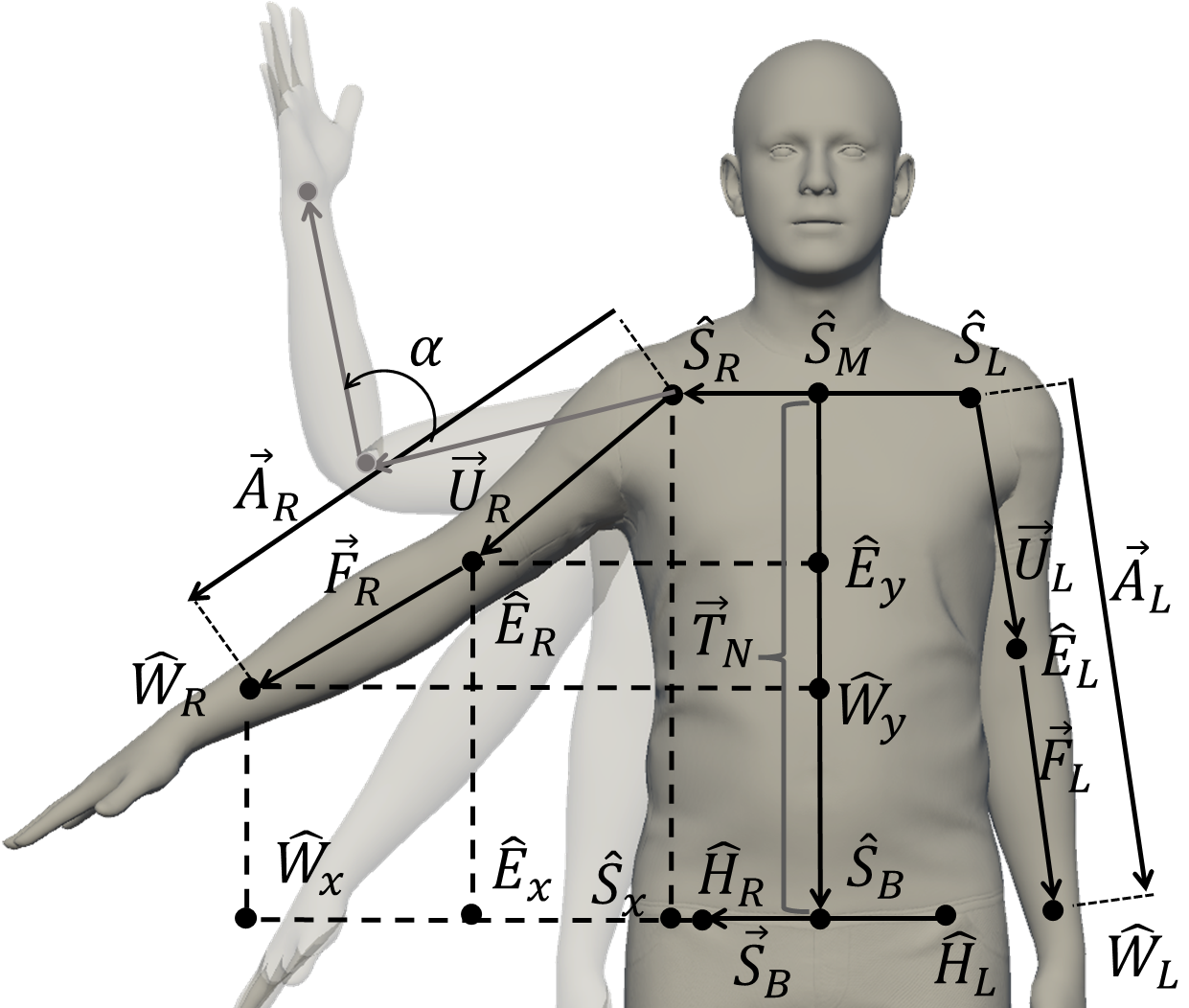
- Using Capability Maps Tailored to Arm Range of Motion in VR Exergames for RehabilitationIn 2024 46th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), 2024
Many neurological conditions, e.g., a stroke, can cause patients to experience upper limb (UL) motor impairments that hinder their daily activities. For such patients, while rehabilitation therapy is key for regaining autonomy and restoring mobility, its long-term nature entails ongoing time commitment and it is often not sufficiently engaging. Virtual reality (VR) can transform rehabilitation therapy into engaging game-like tasks that can be tailored to patient-specific activities, set goals, and provide rehabilitation assessment. Yet, most VR systems lack built-in methods to track progress over time and alter rehabilitation programs accordingly. We propose using arm kinematic modeling and capability maps to allow a VR system to understand a user’s physical capability and limitation. Next, we suggest two use cases for the VR system to utilize the user’s capability map for tailoring rehabilitation programs. Finally, for one use case, it is shown that the VR system can emphasize and assess the use of specific UL joints.
@inproceedings{lourido2024cmap, title = {Using Capability Maps Tailored to Arm Range of Motion in VR Exergames for Rehabilitation}, author = {Lourido, Christian and Waghoo, Zaid and Wazir, Hassam Khan and Bhagat, Nishtha and Kapila, Vikram}, booktitle = {2024 46th Annual International Conference of the IEEE Engineering in Medicine \& Biology Society (EMBC)}, pages = {1--4}, year = {2024}, organization = {IEEE}, url = {https://ieeexplore.ieee.org/abstract/document/10781958}, google_scholar_id = {LkGwnXOMwfcC}, } - Wireless Earphone-based Real-Time Monitoring of Breathing Exercises: A Deep Learning ApproachHassam Khan Wazir, Zaid Waghoo, and Vikram KapilaIn 2024 46th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), 2024
Several therapy routines require deep breathing exercises as a key component and patients undergoing such therapies must perform these exercises regularly. Assessing the outcome of a therapy and tailoring its course necessitates monitoring a patient’s compliance with the therapy. While therapy compliance monitoring is routine in a clinical environment, it is challenging to do in an at-home setting. This is so because a home setting lacks access to specialized equipment and skilled professionals needed to effectively monitor the performance of a therapy routine by a patient. For some types of therapies, these challenges can be addressed with the use of consumer-grade hardware, such as earphones and smartphones, as practical solutions. To accurately monitor breathing exercises using wireless earphones, this paper proposes a framework that has the potential for assessing a patient’s compliance with an at-home therapy. The proposed system performs real-time detection of breathing phases and channels with high accuracy by processing a 500 ms audio signal through two convolutional neural networks. The first network, called a channel classifier, distinguishes between nasal and oral breathing, and a pause. The second network, called a phase classifier, determines whether the audio segment is from inhalation or exhalation. According to k-fold cross-validation, the channel and phase classifiers achieved a maximum F1 score of 97.99% and 89.46%, respectively. The results demonstrate the potential of using commodity earphones for real-time breathing channel and phase detection for breathing therapy compliance monitoring.
@inproceedings{wazir2024audio, title = {Wireless Earphone-based Real-Time Monitoring of Breathing Exercises: A Deep Learning Approach}, author = {Wazir, Hassam Khan and Waghoo, Zaid and Kapila, Vikram}, booktitle = {2024 46th Annual International Conference of the IEEE Engineering in Medicine \& Biology Society (EMBC)}, pages = {1--4}, year = {2024}, organization = {IEEE}, url = {https://ieeexplore.ieee.org/document/10782159}, google_scholar_id = {_FxGoFyzp5QC}, } - Dissertation
 Exploratory Research at the Convergence of Frontier Technologies to Advance Digital Health and Telerehabilitation with Emphasis on Applications for Geriatric PopulationHassam Khan Wazir2024
Exploratory Research at the Convergence of Frontier Technologies to Advance Digital Health and Telerehabilitation with Emphasis on Applications for Geriatric PopulationHassam Khan Wazir2024This dissertation examines the implications of an aging global population on the healthcare system, highlighting the increasing preference for aging-in-place and the consequent burden on healthcare services and caregivers. With advancements in healthcare enabling more individuals to live longer, the demand for supportive care and rehabilitation services that allow older adults to remain in their homes is also increasing. This scenario emphasizes the critical role of ambient assistive technology in facilitating aging-in-place, offering relief to caregivers and healthcare providers who are under increasing pressure. Therefore, a strong case is made to introduce modern, data-driven, approaches to facilitate more optimized strategies for delivering at-home treatment and enable older individuals to monitor their health and seek treatment before further health complications arise. Recognizing the vast landscape of caregiving, digital health, and telerehabilitation, this study focuses on three important areas: caregiving in the hospital setting, caregiving at home, and therapy compliance monitoring. More specifically, the dissertation discusses the implementation of teleoperated robots, controlled through smart devices in healthcare settings, to offer care while reducing the risk of patient contagion. It also examines the application of digital voice assistants and vision-based methods for assessing range of motion. Furthermore, it investigates the use of smart devices to monitor therapy, focusing on breathing and physical exercises. Finally, the document explores how consumer wireless devices and smartphones can be utilized for the indoor localization of elderly individuals, aiming to improve their safety and autonomy. By investigating these domains, the dissertation aims to shed light on innovative solutions that utilize consumer devices coupled with mechatronic and robotic systems to support caregivers across settings and enhance the effectiveness of therapy adherence among the elderly. Through a detailed exploration of these topics, the research contributes to the broader discourse on leveraging technology to meet the evolving needs of an aging population and the entities that provide them with care.
@phdthesis{wazir2024exploratory, title = {Exploratory Research at the Convergence of Frontier Technologies to Advance Digital Health and Telerehabilitation with Emphasis on Applications for Geriatric Population}, author = {Wazir, Hassam Khan}, journal = {ProQuest Dissertations and Theses}, year = {2024}, pages = {142}, url = {https://www.proquest.com/docview/3061502943?pq-origsite=gscholar&fromopenview=true&sourcetype=Dissertations%20&%20Theses}, google_scholar_id = {Se3iqnhoufwC}, }
2023
- PatentContainment, Treatment, and Removal of Aerosolized Viral ContaminationVikram Kapila, Valentin Siderskiy, Armando Granado, and 7 more authorsJul 2023US Patent App. 18/002,125
The present invention provides devices and methods to capture airborne agents, microbes, including viruses, and microbial antigens, toxins and allergens and prevent the spread of infection from direct contact with contaminated surfaces (contact contamination), from large droplets of infectious material that fall out of the air, or from small droplets that can be carried by the air stream throughout the environment (airborne contamination).
@misc{kapila2023containment, title = {Containment, Treatment, and Removal of Aerosolized Viral Contamination}, author = {Kapila, Vikram and Siderskiy, Valentin and Granado, Armando and Kumar, Sahil and Sowers, Tom and Wazir, Hassam Khan and Kilcourse, Miles Quinn and Krishnamoothy, Sai Prasanth and Gonzalez, Ryan and others}, year = {2023}, month = jul, publisher = {Google Patents}, note = {US Patent App. 18/002,125}, url = {https://patents.google.com/patent/US20230218463A1/en}, google_scholar_id = {W7OEmFMy1HYC} }
2022
- Range of Motion Assessment using a Digital Voice AssistantHassam Khan Wazir, Kshitij Gaikwad, and Vikram KapilaIn 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Jul 2022
Range of motion (ROM) is an important indicator of an individual’s physical health, and its degradation impacts their ability to perform activities of daily living. The elderly are particularly susceptible to mobility loss due to muscular decline, neuromuscular disorders, sedentary lifestyle, etc. Thus, they must undergo periodic ROM assessments to track their physical well-being and consult doctors for any decline in ROM. An at-home ROM assessment device can assist the elderly to self-perform ROM assessment and facilitate remote monitoring of and compliance to therapy. The pervasive adoption of digital voice assistants (DVAs), that include a monocular camera, offers an opportunity for at-home ROM assessment. This paper proposes using a DVA for ROM measurement by utilizing 2D pose estimation techniques to estimate 3D limb pose for specific exercises. The system employs the MediaPipe library to perform 2D pose estimation and uses the joint coordinates to find the 3D pose of the limb using a 2D projection method. To validate the system, it is first compared with a 3D human model performing various shoulder and elbow exercises in a virtual environment. Next, for further validation, a neurologically intact individual performs the same exercises and the results of the proposed system are compared with the results from a markerless optical motion capture system (Kinect). The Bland-Altman limits of agreement (LOA) are computed and provided for the two sets of comparisons. The results demonstrate the feasibility of the proposed system in providing reliable ROM measurements using a DVA and suggest possible enhancements. Clinical relevance— This paper introduces the concept of ROM measurement using digital voice assistants embedded with a monocular camera
@inproceedings{wazir2022dva, title = {Range of Motion Assessment using a Digital Voice Assistant}, author = {Wazir, Hassam Khan and Gaikwad, Kshitij and Kapila, Vikram}, booktitle = {2022 44th Annual International Conference of the IEEE Engineering in Medicine \& Biology Society (EMBC)}, pages = {2577--2580}, year = {2022}, organization = {IEEE}, url = {https://ieeexplore.ieee.org/abstract/document/9870888}, google_scholar_id = {ufrVoPGSRksC}, } - A lymphatic drainage robot for lymphedema rehabilitationManthan Pawar, Hassam Khan Wazir, and Vikram KapilaIn 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Jul 2022
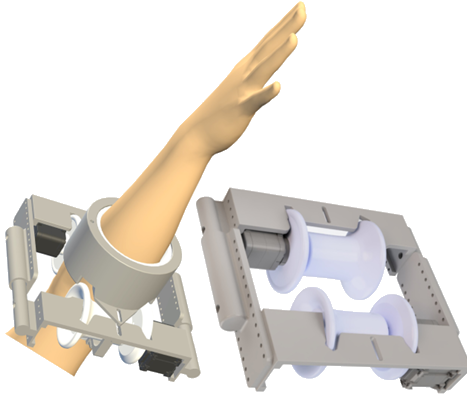
Lymphedema is a medical condition that results in swelling and discomfort in human arms or legs. Caused due to the build-up of lymph fluid in the tissues under the skin, lymphedema commonly affects one of the arms or legs and it is an incurable condition that requires treatment for control. A common treatment is manual lymphatic drainage (MLD), a massage therapy to remove the excess lymphatic fluid out of the tissues back into the lymphatic vessels. This paper proposes a portable and mobile device, lymphatic drainage robot (LDR), as an alternative to MLD. The prototype LDR, a combination of soft and hard robotic hardware, stimulates the lymphatic system. The robot climbs up the human limb, i.e., an arm or a leg, while applying radial pressure on the skin to remove the excess lymph fluid into the lymph vessels towards the upper side of the limb. The preliminary design of the device stipulated in this paper can be transformed into a product that can be commercially-produced and provided directly to the rehabilitation clinics and lymphedema patients. Clinical relevance - This paper presents a working prototype of an autonomous robotic product that simulates MLD towards the rehabilitation of lymphedema condition.
@inproceedings{pawar2022lymphatic, title = {A lymphatic drainage robot for lymphedema rehabilitation}, author = {Pawar, Manthan and Wazir, Hassam Khan and Kapila, Vikram}, booktitle = {2022 44th Annual International Conference of the IEEE Engineering in Medicine \& Biology Society (EMBC)}, pages = {2598--2601}, year = {2022}, organization = {IEEE}, url = {https://ieeexplore.ieee.org/abstract/document/9871226}, google_scholar_id = {WF5omc3nYNoC}, }
2021
- A COVID-19 emergency response for remote control of a dialysis machine with mobile HRIFrontiers in Robotics and AI, Jul 2021
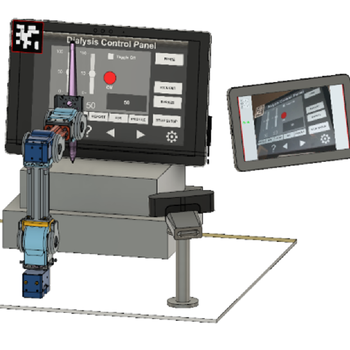
Healthcare workers face a high risk of contagion during a pandemic due to their close proximity to patients. The situation is further exacerbated in the case of a shortage of personal protective equipment that can increase the risk of exposure for the healthcare workers and even non-pandemic related patients, such as those on dialysis. In this study, we propose an emergency, non-invasive remote monitoring and control response system to retrofit dialysis machines with robotic manipulators for safely supporting the treatment of patients with acute kidney disease. Specifically, as a proof-of-concept, we mock-up the touchscreen instrument control panel of a dialysis machine and live-stream it to a remote user’s tablet computer device. Then, the user performs touch-based interactions on the tablet device to send commands to the robot to manipulate the instrument controls on the touchscreen of the dialysis machine. To evaluate the performance of the proposed system, we conduct an accuracy test. Moreover, we perform qualitative user studies using two modes of interaction with the designed system to measure the user task load and system usability and to obtain user feedback. The two modes of interaction included a touch-based interaction using a tablet device and a click-based interaction using a computer. The results indicate no statistically significant difference in the relatively low task load experienced by the users for both modes of interaction. Moreover, the system usability survey results reveal no statistically significant difference in the user experience for both modes of interaction except that users experienced a more consistent performance with the click-based interaction vs. the touch-based interaction. Based on the user feedback, we suggest an improvement to the proposed system and illustrate an implementation that corrects the distorted perception of the instrumentation control panel live-stream for a better and consistent user experience.
@article{wazir2021covid, title = {A COVID-19 emergency response for remote control of a dialysis machine with mobile HRI}, author = {Wazir, Hassam Khan and Lourido, Christian and Chacko, Sonia Mary and Kapila, Vikram}, journal = {Frontiers in Robotics and AI}, volume = {8}, pages = {612855}, year = {2021}, publisher = {Frontiers Media SA}, url = {https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2021.612855/full}, google_scholar_id = {IjCSPb-OGe4C}, }
2020
- A wearable pendant sensor to monitor compliance with range of motion lymphatic health exerciseIn 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Jul 2020
Lymphedema is a chronic and debilitating condition affecting 1 in 1000 Americans and there is no known cure for it. The optimal lymph flow (TOLF) is an effective preventive exercise program designed to reduce the risks of lymphedema. This paper proposes a portable and wearable medical device to monitor compliance with the TOLF therapy. Specifically, the wearable pendant sensor (WPS), a low-fidelity prototype of the proposed design, is developed and tested in comparison with a markerless optical motion capture system (Kinect) for measurement accuracy during shoulder abduction-adduction and flexion-extension exercises. It is shown that the Kendall’s Tau between the measurements obtained from the WPS and Kinect devices yields a correlation coefficient ρ = 0.807 for abduction-adduction exercise and ρ = 0.783 for flexion-extension exercise with a significance level of p < 0.001, indicating a strong correlation and high statistical significance. Following careful clinical assessment and validation, preliminary engineering design of this paper can be transformed into an Internet of Things (IoT)-based medical device to facilitate telemonitoring of TOLF therapy. Deployment of such an IoT-based device in patient homes can permit remote assessment of motor function to enhance treatment adherence.Clinical Relevance—This paper documents a WPS with potential to render an IoT-based medical device for monitoring adherence to TOLF exercise program to prevent the risk of post-operative lymphedema.
@inproceedings{wazir2020wearable, title = {A wearable pendant sensor to monitor compliance with range of motion lymphatic health exercise}, author = {Wazir, Hassam Khan and Bethi, Satish Reddy and Kumar, Ashwin Raj and Caruso, Fabio and Kapila, Vikram}, booktitle = {2020 42nd Annual International Conference of the IEEE Engineering in Medicine \& Biology Society (EMBC)}, pages = {4588--4591}, year = {2020}, organization = {IEEE}, url = {https://ieeexplore.ieee.org/abstract/document/9175471}, google_scholar_id = {UeHWp8X0CEIC}, }

2019
- Wearable inertial sensors for range of motion assessmentIEEE Sensors Journal, Jul 2019
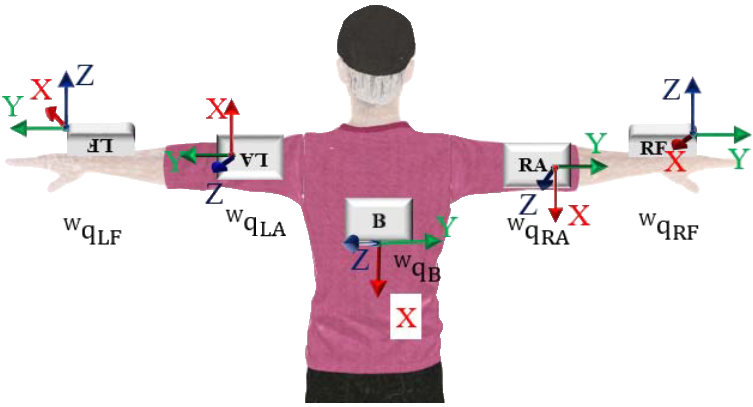
This paper presents the design and development of wearable inertial sensors (WIS) for real-time simultaneous triplanar motion capture of the upper extremity (UE). The sensors simultaneously capture in the frontal, sagittal, and horizontal planes UE range of motion (ROM), which is critical to assess an individual’s movement limitations and determine appropriate rehabilitative treatments. Off-theshelf sensors and microcontrollers are used to develop the WIS system, which wirelessly streams real-time joint orientation for UE ROM measurement. Key developments include: (i) two novel approaches, using earth’s gravity (EG approach) and magnetic field (EGM approach) as references, to correct misalignments in the orientation between the sensor and its housing to minimize measurement errors; (ii) implementation of the joint coordinate system (JCS)-based method for triplanar ROM measurements for clinical use; and (iii) an in-situ guided mounting technique for accurate sensor placement and alignment on human body. The results (i) compare computational time between two orientation misalignment correction approaches (EG approach = 325.05 μs and EGM approach = 92.05μs); (ii) demonstrate the accuracy and repeatability of measurements from the WIS system (percent deviation of measured angle from applied angle is less than ±6.5% and percent coefficient of variation is less than 11%, indicating acceptable accuracy and repeatability,respectively); and (iii) demonstrate the feasibility of using the WIS system within the JCS framework for providing anatomicallycorrect simultaneous triplanar ROM measurements of shoulder, elbow, and forearm movements during several upper limb exercises.
@article{rajkumar2019wise, title = {Wearable inertial sensors for range of motion assessment}, author = {Rajkumar, Ashwin and Vulpi, Fabio and Bethi, Satish Reddy and Wazir, Hassam Khan and Raghavan, Preeti and Kapila, Vikram}, journal = {IEEE Sensors Journal}, volume = {20}, number = {7}, pages = {3777--3787}, year = {2019}, publisher = {IEEE}, url = {https://ieeexplore.ieee.org/abstract/document/8935386}, google_scholar_id = {eQOLeE2rZwMC}, }
2014
- BICET
 Using unity for 3D object orientation in a virtual environmentHassam Khan Wazir and Fawaz Yahya AnnazIn 5th Brunei International Conference on Engineering and Technology (BICET 2014), Jul 2014
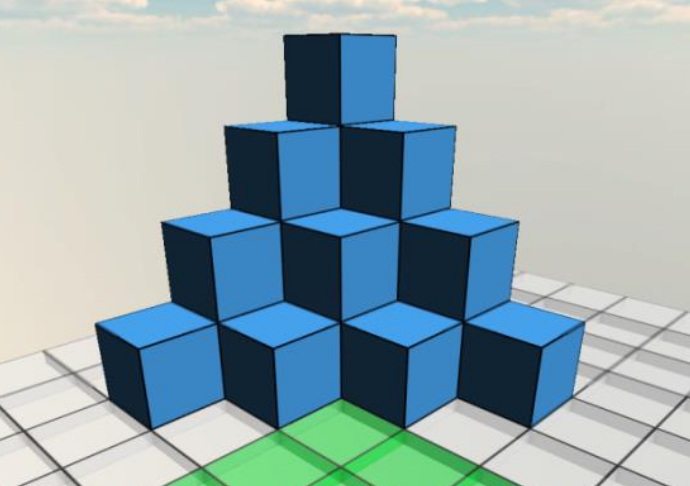
Using unity for 3D object orientation in a virtual environmentHassam Khan Wazir and Fawaz Yahya AnnazIn 5th Brunei International Conference on Engineering and Technology (BICET 2014), Jul 2014Although Unmanned Aerial Vehicles (UAVs) have gained a lot of attention by researchers in the past couple of decades, the development of UAV safe and efficient test platforms still needs much attention. The main reason for this being the unstable nature of the platforms and the potential risks associated with multi-rotor UAVs. To address and understand the above problems, this paper introduces UAV navigation in a virtually generated environment that is coupled to the real hardware platform. The virtual environment (VE) is developed using the Unity game engine, providing users with sufficient tools to build 3 dimensional, multi-level maps. The VE parses the orientation data (received from the hardware) and depicts instances of a UAV inside the created VE maps. Thus, this approach provides a suitable environment to examine different geographical scenarios and to test control and navigation algorithms to their limits without the need to physically manoeuvre the UAV and risk damaging it while doing so.
@inproceedings{wazir2014using, title = {Using unity for 3D object orientation in a virtual environment}, author = {Wazir, Hassam Khan and Annaz, Fawaz Yahya}, booktitle = {5th Brunei International Conference on Engineering and Technology (BICET 2014)}, pages = {1--6}, year = {2014}, organization = {IEEE}, url = {https://ieeexplore.ieee.org/abstract/document/7120266}, google_scholar_id = {u-x6o8ySG0sC}, } - BICET
 Hardware-virtual environment integrationHassam Khan Wazir and Fawaz Yahya AnnazIn 5th Brunei International Conference on Engineering and Technology (BICET 2014), Jul 2014
Hardware-virtual environment integrationHassam Khan Wazir and Fawaz Yahya AnnazIn 5th Brunei International Conference on Engineering and Technology (BICET 2014), Jul 2014Testing Unmanned Aerial Vehicles (UAVs) while ensuring safety and still maintaining efficiency seems to be an important issue for researchers due to the unstable nature of the flying platforms. Computer simulations are a popular choice, but they are unable to provide accurate real-time hardware data. Thus, researchers have to rely on the software equivalents of approximate hardware models. This paper introduces the concept of real rotary-winged UAV hardware testbed integration with a Virtual Environment (VE), where navigation within the virtually created environment is possible. During navigation, Inertial Measurement Unit (IMU) data is sent wirelessly to the VE in real-time. The orientation data from the IMU is processed by a microcontroller to calculate the Pitch, Roll and Yaw angles. The data is transmitted wirelessly using a pair of RF modules to the virtual environment created using the Unity engine, running on a computer. The data can then be used to navigate a virtual UAV inside the virtual environment. The testbed will help researchers to emulate flying in different geographical scenarios and test algorithms to their limits without the risk of damaging UAV.
@inproceedings{wazir2014hardware, title = {Hardware-virtual environment integration}, author = {Wazir, Hassam Khan and Annaz, Fawaz Yahya}, booktitle = {5th Brunei International Conference on Engineering and Technology (BICET 2014)}, pages = {1--5}, year = {2014}, organization = {IEEE}, url = {https://ieeexplore.ieee.org/abstract/document/7120265}, google_scholar_id = {u5HHmVD_uO8C}, }